变分自编码器(VAE)是一类常见的生成模型。纯VAE的生成效果不见得是最好的,但VAE还是经常会被用作大模型的子模块。即使是在VAE发明多年的今天,学习VAE还是很有必要的。相比GAN等更符合直觉的模型,彻底理解VAE对数学的要求较高。在这篇文章中,我会从计算机科学的角度出发,简明地讲清楚VAE的核心原理,并附上代码实现的介绍。同时,我会稍微提及VAE是怎么利用数学知识的,以及该怎么去拓展了解这些数学知识。

用自编码器生成图像
在正式开始学习VAE之前,我们先探讨一下内容生成的几种方式,并引入自编码器(Autoencoder, AE)这个概念。为了方面描述,我们仅讨论图像的生成。
在设计生成图像的程序之前,我们要考虑一个问题——程序的输入是什么?如果程序没有任何输入,那么它就应该有一个确定的输出,也就是只能画出一幅图片。而只能画出一幅图片的程序没有任何意义的。因此,一个图像生成模型一定要有输入,用于区分不同的图片。哪怕这种输入仅仅是0, 1, 2这种序号也可以,只要模型能看懂输入,为每个输入生成不同的图片就行了。
可是,我们不仅希望不同的输入能区分不同的图片,还要让相近的输入生成相近的图片。比如1.5号图片应该长得和1号和2号相似。为了让模型满足这种性质,我们可以干脆把模型的输入建模成有意义的高维实数向量。这个向量,可以是看成对图像的一种压缩编码。比如(170, 1)就表示一幅身高为170cm的男性的照片。
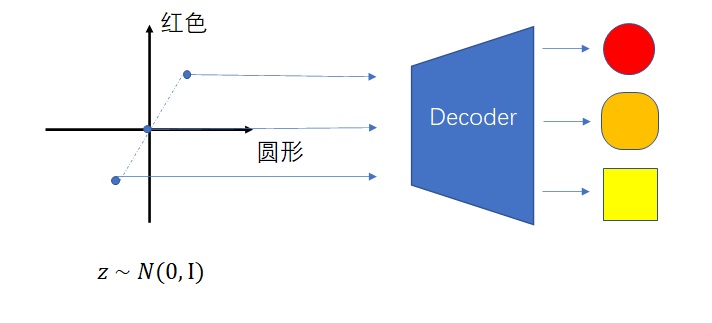
绝大多数生成模型都是用这种方式对生成过程建模。所有的输入向量$z$来自于一个标准正态分布$Z$。图像生成,就是把图像的编码向量$z$解码成一幅图像的过程。不同的生成模型,只是对这个过程有着不同的约束方式。
自编码器的约束方式十分巧妙:既然把$z$翻译回图像是一个解码的过程,为什么不可以把编码的过程也加进来,让整个过程自动学习呢?如下图所示,我们可以让一个模型(编码器)学会怎么把图片压缩成一个编码,再让另一个模型(解码器)学会怎么把编码解压缩成一幅图片,最小化生成图片与原图片之间的误差。
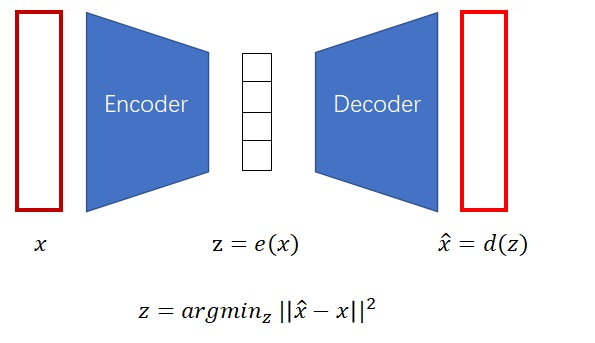
最后,解码器就是我们需要的生成模型。只要在标准多元正态分布里采样出$z$,就可生成图片了。另外,理想情况下,$z$之间的插值向量也能代表在语义上插值的图片。
可是,由于自编码器本身的限制,这种理想不一定能实现。
自编码器的问题——过拟合
自编码器的信息压缩能力十分强大。只要编码器和解码器的神经网络足够复杂,所有训练集里的图像都可以被压缩成非常短的编码。这种编码短到什么程度了呢?——只要一个一维向量(实数)就可以描述所有训练集里的图像了。
想做到这一点并不难。还记得我们开头对生成模型的输入的讨论吗?只要让模型把所有图片以数组的形式存到编码器和解码器里,以0, 1, 2这样的序号来表示每一幅训练集里的图片,就能完成最极致的信息压缩。当然,使用这种方式的话,编码$z$就失去了所有的语义信息,编码之间的插值也不能表示图像语义上的插值了。
这是由模型过拟合导致的。如果仅使用自编码器本身的约束方式,而不加入其他正则化方法的话,一定会出现过拟合。
VAE——一种正则化的自编码器
VAE就是一种使用了某种正则化方法的自编码器,它解决了上述的过拟合问题。VAE使用的这种方法来自于概率论的变分推理,不过,我们可以在完全不了解变分推理的前提下看懂VAE。
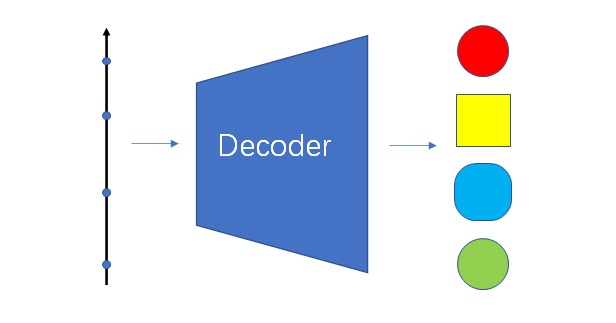
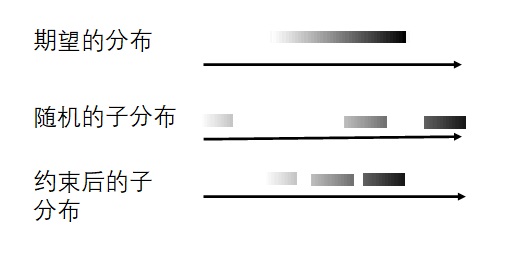
VAE的想法是这样的:我们最终希望得到一个分布$Z$,或者说一条连续的直线。可是,编码器每次只能把图片编码成一个向量,也就是一个点。很多点是很难重建出一条连续的直线的。既然如此,我们可以把每张图片也编码成一个分布。多条直线,就可以比较容易地拼成我们想要的直线了。
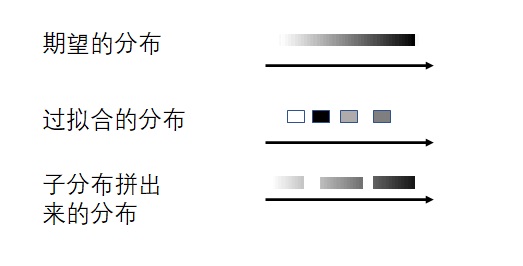
当然,只让模型去拟合分布是不够的。如果各个分布都乱七八糟,相距甚远,那么它们怎么都拼不成一个标准正态分布。因此,我们还需要加上一个约束,让各个分布和标准正态分布尽可能相似。
这样,我们可以总结一下VAE的训练框架。VAE依然使用了编码器-解码器的架构。只不过,编码器的输出是一个可学习的正态分布。对分布是不可能做求导和梯度下降的,但我们可以去分布里采样,对采样出来的编码$z$解码并求导。
另外,VAE的损失函数除了要最小化重建图像与原图像之间的均方误差外,还要最大化每个分布和标准正态分布之间的相似度。
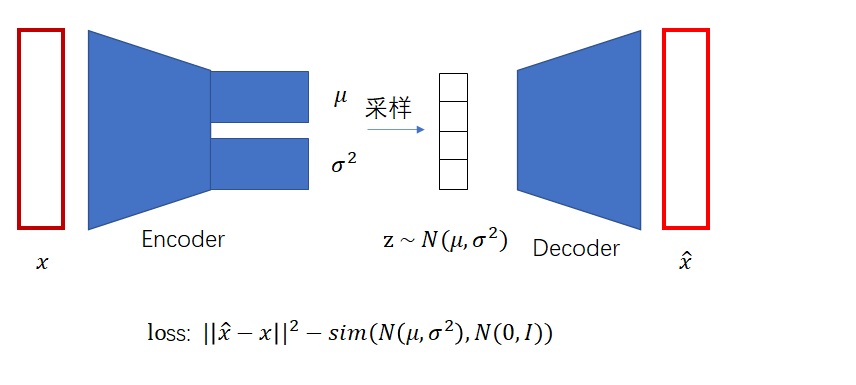
常见的描述分布之间相似度的指标叫做KL散度。只要把KL散度的公式套进损失函数里,整个训练框架就算搭好了。
如果你对KL散度的原理感兴趣,欢迎阅读我的上一篇文章:从零理解熵、交叉熵、KL散度
VAE的原理其实就是这么简单。总结一下,VAE本身是一个编码器-解码器结构的自编码器,只不过编码器的输出是一个分布,而解码器的输入是该分布的一个样本。另外,在损失函数中,除了要让重建图像和原图像更接近以外,还要让输出的分布和标准正态分布更加接近。
VAE 与变分推理
前几段其实只对VAE做了一个直觉上的描述,VAE的损失函数实际上是经严谨的数学推导得到的。如果你对数学知识不感兴趣,完全可以跳过这一节的讲解。当然,这一节也只会简单地描述VAE和变分推理的关系,更详细的数学推导可以去参考网上的其他文章。
让我们从概率论的角度看待生成模型。生成模型中的$z$可以看成是隐变量,它决定了能观测到的变量$x$。比如说,袋子里有黑球和白球,你不断地从袋子里取球出来再放回去,就能够统计出抽到黑球和白球的频率。然而,真正决定这个频率的,是袋子里黑球和白球的数量,这些数量就是观测不到的隐变量。简单来说,隐变量$z$是因,变量$x$是果。
生成模型,其实就是假设$z$来自标准正态分布,想要拟合分布$P(x|z)$(解码器),以得到$x$的分布(图像分布)。为了训练解码器,自编码器架构使用了一个编码器以描述$P(z|x)$。这样,从训练集里采样,等于是采样出了一个$x$。根据$P(z|x)$求出一个$z$,再根据$P(x|z)$试图重建$x$。优化这个过程,就是在优化编码器和解码器,也就是优化$P(z|x)$和$P(x|z)$。
然而,$P(z|x)$和$P(x|z)$之间有一个约束,它们必须满足贝叶斯公式:
假如我们要用一个和$x$有关的关于$z$的分布$Q_x(z)$去拟合$P(z|x)$,就要让$Q_x(z)$和$\frac{P(x|z)P(z)}{P(x)}$这两个分布尽可能相似。如果这个相似度是KL散度,经过一系列的推导,就可以推导出我们在VAE里使用的那个损失函数。
简单来说,拟合一个未知分布的技术就叫做变分推理。VAE利用变分推理,对模型的编码器和解码器加了一个约束,这个约束在化简后就是VAE的损失函数。
VAE和变分推理的关系就是这样。如果还想细究,可以去先学习KL散度相关的知识,再去看一下VAE中KL散度的公式推导。当然,不懂这些概念并不影响VAE的学习。
总结
VAE其实就是一个编码器-解码器架构,和U-Net以及部分NLP模型类似。然而,为了抑制自编码过程中的过拟合,VAE编码器的输出是一个正态分布,而不是一个具体的编码。同时,VAE的损失函数除了约束重建图像外,还约束了生成的分布。在这些改进下,VAE能够顺利地训练出一个解码器,以把来自正态分布的随机变量$z$画成一幅图像。
如果你想通过代码实践进一步加深对VAE的理解,可以阅读附录。
参考资料
- 一篇不错的VAE讲解。我是跟着这篇文章学习的。https://towardsdatascience.com/understanding-variational-autoencoders-vaes-f70510919f73
- 我的VAE PyTorch实现参考了这个仓库:https://github.com/AntixK/PyTorch-VAE 。开头的人脸生成效果图是从这个项目里摘抄过来的。
VAE PyTorch 实现
项目网址:https://github.com/SingleZombie/DL-Demos/tree/master/dldemos/VAE
数据集
在这个项目中,我使用了CelebA数据集。这个数据集有200k张人脸,裁剪和对齐后的图片只有1个多G,对实验非常友好。
CelebA的下载链接可以在官方网站上找到:https://mmlab.ie.cuhk.edu.hk/projects/CelebA.html。
下载好了图片后,可以用下面的代码创建Dataloader。
1 | import os |
这段代码是一段非常常规的根据图片路径读取图片的代码。只有少数地方需要说明:
- 为了尽快完成demo,所有人脸图片的分辨率都是$64 \times 64$。
- CelebA里裁剪后的人脸图片是长方形的。要先调用
CenterCrop裁剪出正方形人脸,再做Resize。
为了验证Dataloader的正确性,我们可以写一些脚本来查看Dataloader里的一个batch的图片。
1 | if __name__ == '__main__': |

这段代码使用了一些小技巧。首先,
next(iter(dataloader))可以访问Dataloader的第一个数据。其次,在把一个batch的图片转换成图片方格的过程中,我使用了比较骚的换维度、换形状操作,看起来很帅。
模型
我的VAE模型使用了类似U-Net的操作:编码器用卷积把图像的边长减半,通道翻倍,解码器用反卷积把图像的边长翻倍,通道减半。
模型结构的定义函数如下:
1 | import torch |
首先来看编码器的部分。每个卷积模块由卷积、BN、ReLU构成。卷完了再用两个全连接层分别生成正态分布的均值和方差。注意,卷积完成后,图像的形状是[prev_channels, img_length, img_length],为了把它输入到全连接层,我们到时候会做一个flatten操作。
1 | # encoder |
解码器和编码器的操作基本完全相反。由于隐变量的维度是latent_dim,需要再用一个全连接层把图像的维度投影回[prev_channels, img_length, img_length]。之后就是反卷积放大图像的过程。写这些代码时一定要算好图像的边长,定好反卷积的次数,并且不要忘记最后把图像的通道数转换回3。
1 | # decoder |
网络前向传播的过程如正文所述,先是用编码器编码,把图像压平送进全连接层得到均值和方差,再用randn_like随机采样,把采样的z投影、变换成正确的维度,送入解码器,最后输出重建图像以及正态分布的均值和方差。
1 | def forward(self, x): |
用该模型随机生成图像的过程和前向传播的过程十分类似,只不过$z$来自于标准正态分布而已,解码过程是一模一样的。
1 | def sample(self, device='cuda'): |
主函数
在主函数中,我们要先完成模型训练。在训练前,还有一件重要的事情要做:定义损失函数。
1 | from time import time |
如正文所述,VAE的loss包括两部分:图像的重建误差和分布之间的KL散度。二者的比例可以通过kl_weight来控制。
KL散度的公式直接去网上照抄即可。
这里要解释一下,我们的方差为什么使用其自然对数logvar。经过我的实验,如果让模型输出方差本身的话,就要在损失函数里对齐取一次自然对数。如果方差很小,趋于0的话,方差的对数就趋于无穷。这表现在loss里会出现nan。因此,在神经网络中我们应该避免拟合要取对数的数,而是直接去拟合其对数运算结果。
准备好了损失函数,剩下就是常规的训练操作了。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22def train(device, dataloader, model):
optimizer = torch.optim.Adam(model.parameters(), lr)
dataset_len = len(dataloader.dataset)
begin_time = time()
# train
for i in range(n_epochs):
loss_sum = 0
for x in dataloader:
x = x.to(device)
y_hat, mean, logvar = model(x)
loss = loss_fn(x, y_hat, mean, logvar)
optimizer.zero_grad()
loss.backward()
optimizer.step()
loss_sum += loss
loss_sum /= dataset_len
training_time = time() - begin_time
minute = int(training_time // 60)
second = int(training_time % 60)
print(f'epoch {i}: loss {loss_sum} {minute}:{second}')
torch.save(model.state_dict(), 'dldemos/VAE/model.pth')
训练好模型后,想要查看模型重建数据集图片的效果也很简单,去dataloader里采样、跑模型、后处理结果即可。
1 | def reconstruct(device, dataloader, model): |
想用模型随机生成图片的话,可以利用之前写好的模型采样函数。
1 | def generate(device, model): |
在3090上跑这个实验,100个epoch需要5个多小时。但是,模型差不多在10多个epoch的时候就收敛了。
最朴素的VAE的重建效果并不是很好,只能大概看出个脸型。这可能也和我的模型参数较少有关。

随机生成的图片也是形状还可以,但非常模糊。