学习提示
第二门课的知识点比较分散,开始展示每周的笔记之前,我会先梳理一下每周涉及的知识。
这一周会先介绍改进机器学习模型的基本方法。为了介绍这项知识,我们会学习两个新的概念:数据集的划分、偏差与方差问题。知道这两个概念后,我们就能够诊断当前机器学习模型存在的问题,进而找出改进的方法。
之后,我们会针对“高方差问题”,学习一系列解决此问题的方法。这些方法成为“正则化方法”。这周介绍的正则化方法有:添加正则化项、dropout、数据增强、提前停止。
最后,我们会学习几项和神经网络相关的技术。我们会学习用于加速训练的输入归一化,用于防止梯度计算出现问题的参数带权初始化,以及用于程序调试的梯度检查。
课堂笔记
数据集的划分:训练集/开发集/测试集
在使用机器学习的数据集时,我们一般把数据集分成三份:训练集、开发集、测试集。
机器学习是比深度学习的父集,表示一个更大的人工智能算法的集合。
开发集(Development Set)另一种常见的称呼是验证集(Validation Set),即保留交叉验证(Hold-out Cross Validation)。
三种数据集的定义
它们三者的区别如下:
| 训练集 | 开发集 | 测试集 | |
|---|---|---|---|
| 用于优化参数 | 是 | 否 | 否 |
| 训练时可见? | 是 | 是 | 否 |
| 最终测试时可见? | 是 | 是 | 是 |
训练集就是令模型去拟合的数据。对于神经网络来说,我们把某类数据集输入进网络,之后用反向传播来优化网络的参数。这个过程中用的数据集就是训练集。
开发集是我们在训练时调整超参数时用到的数据集。我们会测试不同的超参数,看看模型在开发集上的性能,并选择令模型在开发集上最优的一组超参数。
测试集是我们最终用来评估模型的数据集。当模型在测试集上评测时,我们的模型已经不允许修改了。我们一般把模型在测试集上的评测结果作为模型的性能评估标准。
在我们之前实现的小猫分类项目中,准确来说,我们使用的不叫测试集,而叫做开发集,因为我们是根据那个”testing set”优化网络超参数的。
有人把训练集比作上课,开发集比作作业,测试集比作考试。如果你理解了这三个数据集的原理,会发现这个比喻还是挺贴切的。事实上,由于测试集不参与训练,一个机器学习项目可以没有测试集,就像我们哪怕不经过考试,也可以学到知识一样。
人们很容易混淆开发集/测试集。很多论文甚至把开发集作为最终的性能评估结果。但是很多时候审稿人对这些细节并不在意。作为有操守的研究者,应该严肃地区分开发集与测试集。
通过划分数据得到训练/测试集
在前一个机器学习纪元,人们通常会拿到一批数据,按7:3的比例划分训练集/测试集(对于没有超参数要调的模型),或者按6:2:2的比例划分训练集/开发集/测试集。
而在深度学习时代,数据量大大增加。实际上,开发集和测试集的目的都是评估模型,而评估模型所需的数据没有训练需要得那么多。所以,当整体的数据规模达到百万级,甚至更多时,我们只需要各取10000组数据作为开发集和测试集即可。
收集来自不同分布的数据集
除了从同一批数据中划分出不同的数据集,还有另一种得到训练集、测试集的方式——从不同分布中收集数据集。
分布是统计学里的概念,这里可以理解成不同来源,内容的“平均值”差别很大的数据。
比如,假如我们要为某个小猫分类器收集小猫的图片,我们的训练图片可以是来自互联网,而开发和验证的数据来自用户用收集拍摄的图片。
注意,由于开发集和验证集都是用来评估的,它们应该来自同一个分布。
偏差与方差
机器学习中,我们的模型会出现高偏差或/和高误差的问题。我们需要设法判断我们的模型是否有这些问题。
偏差(bias)与方差(variance)是统计学里的概念,前者表示一组数据离期待的平均值的差距,后者表示数据的离散程度。
试想一个射击运动员在打靶。偏差与打靶的总分数有关,因为总分越高,意味着每次射击都很靠近靶心;方差与选手的发挥稳定性有关,比如一个不稳定的选手可能一次9环,一次6环。
高偏差意味着模型总是不能得到很好的结果,高方差意味着模型不能很好地在所有数据集上取得好的结果(即只能在某些特定数据集上表现较好,在其他数据集上都表现较差)。
我们把高偏差的情况叫做“欠拟合”(可能模型还没有训练完,所以表现不够好),把高方差的情况叫做“过拟合”(模型在训练集上训练过头了,结果模型只能在训练集上有很好的表现,在其他数据集上表现偶读不好)。
让我们看课件里的一个点集分类的例子:
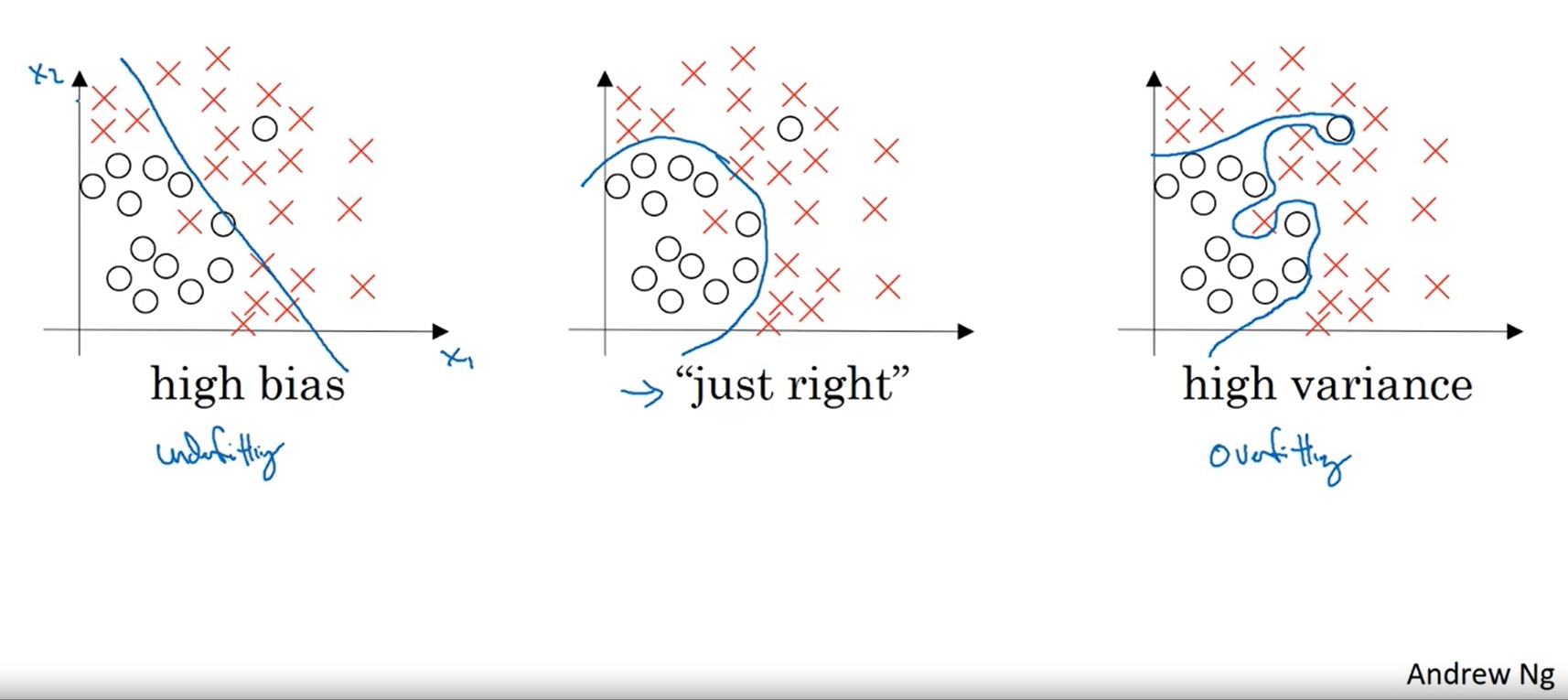
上图显示了欠拟合、“恰好”、过拟合这三种情况。
对于欠拟合的情况来说,一条直线并不足以把两类点分开,这个模型的整体表现较差。
对于过拟合的情况来说,模型过分追求训练集上的正确,结果产生了一条很奇怪的曲线。由于训练数据是有噪声(数据的标签不完全正确)的,这样的模型在真正的测试上可能表现不佳。
让我们人类来划分的话,最有可能给出的是中间那种划分结果。在这个模型中,虽然有些训练集中的点划分错了,但我们会认为这个模型在绝大多数数据上更合适。当我们用更多的测试数据来测试这个模型时,中间那幅图的测试结果肯定是这三种中最好的。
要判断机器学习模型是否存在高偏差或高方差的现象,可以去观察模型的训练集误差和开发集误差。以下是一个判断示例:
| 情况 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 训练集误差 | 1% | 15% | 0.5% | 15% |
| 开发集误差 | 11% | 16% | 1% | 30% |
| 诊断结果 | 高方差 | 高偏差 | 低误差、低方差 | 高误差、高方差 |
也就是说,如果开发集和训练集的表现差很多,就说明是高方差;如果训练集上的表现都很差,就是高偏差。
上面这些结论建立在最优误差——贝叶斯误差(Beyas Error)是0%的基础上下的判断。很多时候,仅通过输入数据中的信息,是不足以下判断的。比如告诉一个人是长头发,虽然这个人大概率是女生,但我们没有100%的把握说这是女生。如果我们知道人群中留长发的90%是女生,10%是男生,那么在这个“长头发分辨性别”的任务里的贝叶斯误差就是10%。
假如上面那个任务的贝叶斯误差是15%,那么我们认为情况2也是一个低误差的情况,因为它几乎做到了最优的准确率。
改进机器学习的基本方法
通过上一节介绍的看训练误差、测试误差的方式,我们能够诊断出我们的模型当前是否存在高偏差或高误差的问题。这一节我们来讨论如何解决这些问题。
首先检查高偏差问题。如果模型存在高偏差,则应该尝试使用更复杂的网络、更多增加训练时间。
确保模型没有高偏差问题后,才应该开始检查模型的方差。如果模型存在高方差,则应该增加数据或使用正则化。
此外,使用更合理的网络架构,往往对降低误差和方差都有效。
正则化 (Regularization)
其实正则化的意思就是“为防止过拟合而添加额外信息的过程”。在机器学习中,一种正则化方法是给损失函数添加一些与参数有关的额外项,以调整参数在梯度下降中的更新过程。正则化的数学原理我们会在下一节里学习,这一节先认识一下正则化是怎么操作的。
先看一下,对于简单的逻辑回归,我们应该怎么加正则化项。
原来,逻辑回归的损失函数是:
现在我们给它加一个和参数$w$有关的项
最右边那个 $\frac{\lambda}{2m}||w||^2_2$ 就是额外加进来的正则项。其中$\lambda$是一个可调的超参数,$||w||^2_2$表示计算向量$w$的l2范数,即:
也就是说,某向量的l2范数就是它所有分量平方再求和。
类似地,其实向量也有1范数,也可以用来做正则化:
1范数就是向量所有分量取绝对值再求和。
使用1范数做正则化会导致参数中出现很多0。人们还是倾向使用l2范数做正则化。
看到这里,大家或许会有问题:$b$也是逻辑回归的参数,为什么$w$有正则项,$b$就没有?实际上,要给$b$加正则项也可以。但是在大多数情况下,参数$w$的数量远多于$b$, 和$b$相关的正则项几乎不会影响到最终的损失函数。为了让整个过程更简洁一些,$b$的正则项就被省略了。(其实就是程序员们偷懒了,顺便让计算机也偷个懒)
当情况推广到神经网络时,添加正则项的方法是类似的,只不过参数$W$变成了矩阵而已。对应的正则项如下:
其中,
这种矩阵范数叫做Frobenius范数,叫它F-范数就行了。
如之前的文章所述,对于梯度下降算法来说,定义损失函数的根本目的是为了对参数求导。当参数$W$在损失函数里多了一项后,它的导数会有怎样的变化呢?
对于某参数向量$w$来说,其实它的导数就多了一项:
大家知道为什么正则项分母里有一个2了吗?没错,这是为了让求出来的导数更简洁一点。反正有超参数$\lambda$,分母多个2少个2没有任何区别。
最终,参数向量$w$会按如下的方式更新:
仔细一看,其实相较之前的梯度更新公式,只是$w$的系数从$1$变成了$1-\frac{\alpha\lambda}{m}$。因此,用l2范数做正则化的方法会被称为 “权重衰减(Weight Decay)” ,$\lambda$在某些编程框架中直接就被叫做weight decay。
为什么正则项能减少方差
回忆前面见过的“高方差”的拟合曲线:
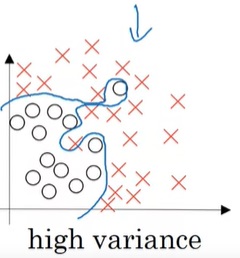
这个曲线之所以能够那么精确地过拟合,是因为这个曲线的参数过多。如果这个曲线的参数少一点,那么它就不会有那么复杂的形状,过拟合现象也会得到缓解。
也就是说,如果神经网络简单一点,每个参数对网络的影响小一点,那么网络就更难去过拟合那些极端的数据。
添加了正则项后,网络的参数都受到了一定的“惩罚”。因此,参数会倾向于变得更小,从而产生刚刚提到的减轻过拟合的效果。
Dropout (失活)
Dropout 怎么翻译都不好听,直接保持英文吧。
还有一种常用的正则化方法叫做 dropout,即随机使神经网络中的一些神经元“失活”。如下图所示:
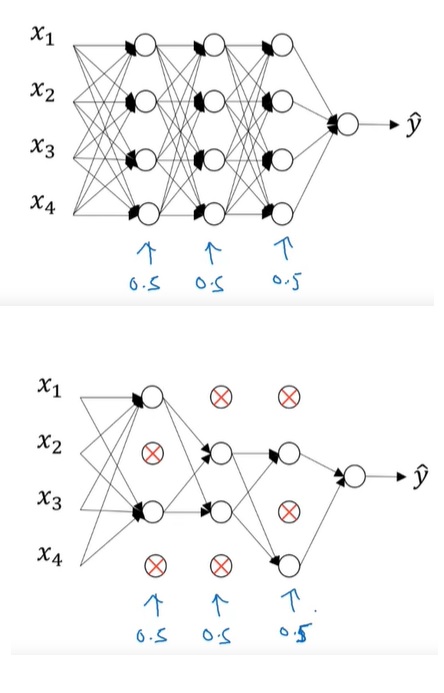
我们可以令所有神经元在每轮训练中有50%的几率失活。在某轮训练中,神经网络的失活情况可能会像上图中下半部分所示:那些打叉的神经元不参与计算和,整个神经网络变得简单了许多。
在实现时,我们常常使用一种叫做”Inverted dropout”的实现方法。Inverted dropout 的思想是:对于神经网络的每一层,生成一个表示有哪些神经元失活的“失活矩阵”,再用这个矩阵去乘上这一层的激活输出(做乘法即令没有失效的激活保持原值,失效的激活取0)
其实现代码如下:
1 | d = np.random.rand(a.shape[0], a.shape[1]) < keep_prob |
这段代码中,d是失活矩阵。该矩阵通过一个随机数矩阵和一个保留概率keep_prob做小于运算生成。np.random.rand可以生成一个矩阵,其中矩阵中每个数都会均匀地随机出现在0~1之间。这样,每个数小于keep_prob的概率都是keep_prob。比如keep_prob=0.8,那么每个神经元都有80%的几率得到保留,20%的几率被丢弃。
做完小于运算后,d其实是一个bool值矩阵。拿bool矩阵和一个普通矩阵做逐对乘法,就等于bool矩阵为True的地方取普通矩阵的原值,bool矩阵为False的地方取0。
最后,得到了丢弃掉某些神经元的激活输出a后,我们还要做一个操作a /= keep_prob。可以想象,如果我们丢掉了一些神经元,那么整个激活输出的“总和”的期望会变小。比如keep_prob为0.8,那么整个输出的大小都近似会变为原来的0.8倍。为了让输出的期望不变,我们要把激活输出除以keep_prob。
如前文所强调的,dropout一次是对一层而言的。也就是说,每一层可以有不同的keep_prob。
dropout可能对损失函数变化曲线产生影响。一般调试时,如果损失函数一直在降,就说明训练算法没什么问题。但是,加入dropout后,由于每次优化的参数不太一样了,损失函数可能不会单调递减。因此,为了调试神经网络,可以先关闭dropout。确定损失函数确实在下降后,再开启它。
由于在CV(计算机视觉)中,图像的输入规模都很大,数据不足而引起过拟合是一件常见的事。因此,dropout在CV中被广泛应用。
注意,dropout是一种训练策略。在测试的时候,不需要使用dropout。
和刚才一样,我们再来探讨一下为什么dropout能够生效。有了dropout,意味着神经网络的权重不能集中在部分神经元上,因为某个神经元随时都可能会失效。因此,神经网络的权重会更加平均。更加平均,意味着计算参数平方的l2范数会更小。也就是说,dropout令参数更平均,起到了和刚刚添加l2正则类似的效果。
其他正则化方法
- 数据增强

比如对于一幅图片,我们可以翻转、旋转、缩进,以生成“更多”的训练数据。
- 提前停止 (early stopping)
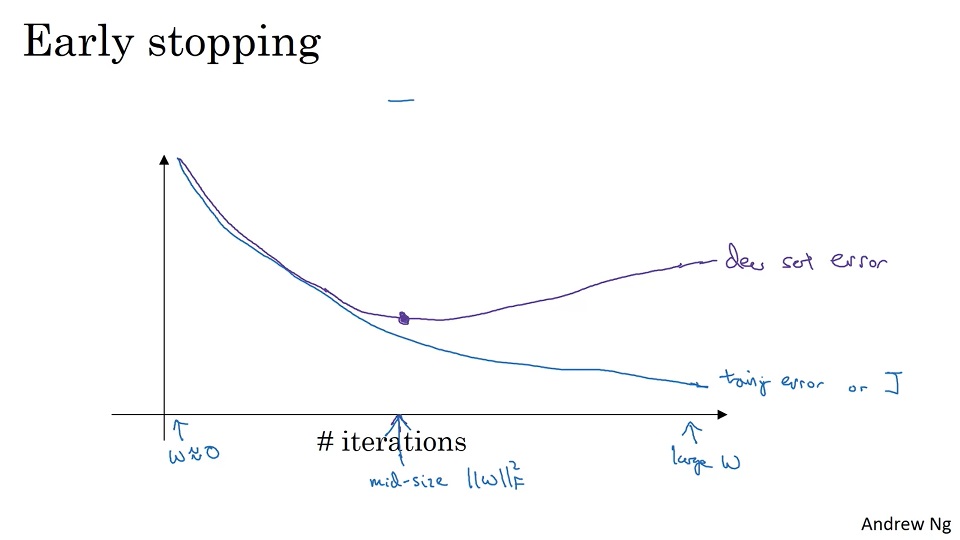
随着训练的进行,网络的损失函数可能越来越小,但开发集上的精度会越来越高。只是因为训练得越久,参数就会越来越大,即越来越倾向于过拟合。提早结束训练,能够让参数取到一个合适的值。
提前中止也有一些不好的地方。在机器学习中,训练模型可以分成两部分:让损失函数更小、防止模型过拟合。我们通常会对这两部分独立地进行优化,即控制优化方法不变,改变正则化方法;或者改变减小梯度的算法,保证模型不进行任何正则化操作。而提前中止实际上混淆了减小损失函数和防止模型过拟合这两件事,不利于采取更多的调试策略。
独立地看待问题的两个变量,这种方法叫做 “正交化”。这种控制变量的思想在科研、编程,甚至是处理人生中各种各样的问题时都很适用。
输入归一化(Normalization)
参考网上的翻译,我把 Normalization 翻译为归一化,Standardization 翻译成标准化。其实这两个中文翻译经常会混着用,翻译上的区别不用太在意。
我们应该尽可能让输入向量的每一个分量都满足标准正态分布。如果你对数学不熟,我们可以来看一个例子:
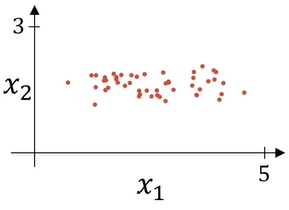
假设我们每个输出张量长度为2,即有两个分量:$x_1, x_2$。我们可以认为每个输入向量就是一个二维平面上的点。统计完了所有样本,我们或许可以发现所有样本的$x_1$位于[0, 5]这个区间,$x_2$位于[0, 3]这个区间,两个区间长度不一。而且,数据在$x_1$上比较分散,$x_2$上比较靠拢。这个训练样本显得非常凌乱。
如果我们让输入归一化,使输入向量的每一个分量都满足了正态分布,难么这些数据可能会长得这样:
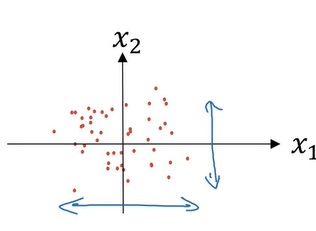
这样,数据分布的区间不仅长度相同,而且离散的程度也相同了。
归一化可以通过以下方式实现:
注意,上式中我们计算方差时没有减均值,这是因为第二步更新的时候均值已经被减掉了。
简单概括这个数学公式,就是“减均值,除方差”。
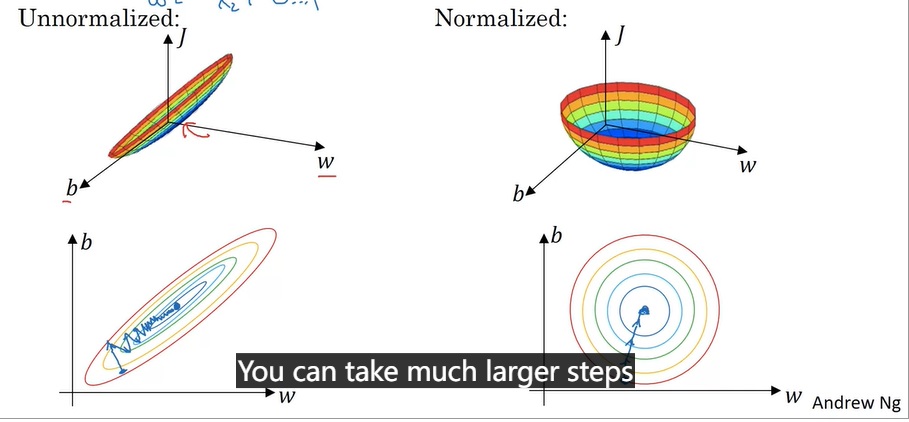
如果输入数据在各个分量上更加均匀,梯度下降的优化会更加便捷。
这里直接记住这个结论,不用过于在意它的数学原理。一种比较直观的解释是:如果分量大小不一,则参数w的每个分量的“作用”也会大小不一。如果w的每个分量都按差不多的“步伐”进行更新,那些“影响力更大”的w分量就会更新得过头,而“影响力更小”的w分量就更新得不足。这样,梯度下降法要耗费更多步才能找到最优值。
梯度爆炸/弥散
如果一个神经网络的层数过深,可能会出现梯度极大或极小的情况,让我们看看这是怎么回事。

假设我们有上图这样一个“很深”的神经网络。我们取消所有的激活函数(即$g(x)=x$),取消所有参数$b$(即$b=0$),那么这个网络的公式就是
其中$W^NaN…W^1$都是2x2的矩阵。我们不妨假设它们都是同样的矩阵,那么上式可以写成
如果$W’$长这个样子:
那么经过$L-1$次矩阵乘法后,这个矩阵就变成这个样子:
由于这里的数值是随着$L$成指数增长的,$L$稍微取一个大一点的值,最后算出来的$A$就会特别大。回顾一下前面的知识,最后一层的$dZ=A-Y$,而$dW$又是和$dZ$相关的。最后的$A$很大,会导致所有算出来的梯度都很大。
这里要批评一下这门课。课堂里有一个地方讲得不够清楚:为什么$A$很大,参数的梯度$dW$就很大。课堂里只是带了一句,说可以用类似的方法得出$dW$的增长规律和$A$类似。但这里漏了一条逻辑链:算梯度的时候,$A$和$dW$有关联性($dZ$和$A$有关,$dW$和$dZ$有关)。直观上来看,$A$很大,不能推出梯度就很大。中间还是欠缺了一步逻辑推理的。学东西和看东西一定要养成批判性思维,考据每一步推理的合理性。
同理,如果矩阵里的数不是1.5,而是0.5,那么整个公式的数值就会指数级下降,从而导致梯度近乎“消失”。
梯度问题的解决方法——加权初始化
推荐一篇讲这个知识点的英文文章:https://towardsdatascience.com/weight-initialization-in-neural-networks-a-journey-from-the-basics-to-kaiming-954fb9b47c79.
刚刚我们讲到,梯度会爆炸或者弥散,本质原因是矩阵$W$的“大小”大于了1或者小于了1,从而使最后的计算结果过大或过小。但反过来想,如果我们令每一层的输出$A^{[l]}$的“大小”都在1附近,那么是不是就不会有梯度指数级变化的问题了呢?
让我们来看看该如何让每层输出$A^{[l]}$都保持一个合适的值。我们考察
这个简单的网络。从直觉上看,如果$n$越大,则公式里的项越多,$Z$也越大。事实上,用统计学知识计算过后,能知道:若$w_i$都是满足标准正态分布的,则$Z$的方差是$n$。我们不希望$Z$的值太大或太小,希望能通过修改$w_i$的大小,让$Z$的方差尽可能等于1。
为了做到这一点,我们可以在$w$的初始化方法上做一点文章。我们可以改变$w$的方差,以改变$Z$的方差。其实,我们只要令$w$的方差为$\frac{1}{n}$就行了。用代码表示就是这样的:
1 | W_l = np.random.randn(shape) * np.sqrt(1 / n[l-1]) |
别忘了哦,这里n[l-1]是第l层参数矩阵W_l的长度,即每个参数向量$w$的长度。
但由于每一层的输入不是$Z$,而是$A=g(Z)$,我们在算方差时还要考虑到激活函数$g$的影响。
经 Kaiming He 等人的研究,使用 Relu 时,初始化的权重用np.sqrt(2/ n[l-1])比较好,即用下面的代码:
1 | W_l = np.random.randn(shape) * np.sqrt(2 / n[l-1]) |
对于 tanh 函数,令权重为 np.sqrt(1 / n[l-1])就行,这叫做 Xavier Initialization。还有研究表明用 np.sqrt(2 / (n[l-1]+n[l]))也行。
总结一下,为了缓解梯度爆炸或梯度弥散的问题,可以对参数使用加权初始化。只需要初始化时多乘一个小系数,这个问题就能很大程度上有所缓解。
梯度检查
进行深度学习编程时,梯度计算是比较容易出BUG的地方。我们可以用一种简单的方法来近似估计一个函数的导数,并将其与我们算出来的导数做一个对比,看看我们的导数计算函数有没有写错。
导数估计公式如下:
这个式子随$\epsilon$收敛得较块,准确来说:
当$lim_{\epsilon \to 0}$时,上面(2)式的收敛速度是$O(\epsilon)$,(3)式的收敛速度是$O(\epsilon^2)$。选用(3)式估计导数是一个更好的选择。
我们可以利用上面的公式调试深度学习中的梯度计算。其步骤如下:
- 把所有参数$W^{[1]}, b^{[1]}…$ reshape 成向量,再把所有向量拼接(concatenate) 成一个新向量$\theta$。
- 现在,我们有损失函数$J(\theta)$和导数$d\theta$。
- 对于某一个参数$\theta_i$,计算其导数估计值:
- 比较$\hat{d_{\theta_i}}, d_{\theta_i}$,计算误差值:
- 遍历所有$\theta_i$,做这个检查。
一般可以令$\epsilon=10^{-7}$。如果error在$10^{-7}$这个量级,则说明导数计算得没什么问题。$10^{-5}$可能要注意一下,而$10^{-3}$则大概率说明这里的导数算得有问题。
使用此梯度检查法时,有一些小提示:
- 不要每次训练的都用,只在训练前调试用。
梯度检查确实很慢,计算复杂度是$\Omega(|\theta|^2)$(这里没有用大O标记,因为复杂度的下界是那个值,而不是上界)(这个复杂度是$|\theta|$乘上算一遍推理的运算量得来的。推理至少遍历每个参数一遍,所以推理的复杂度是$\Omega(|\theta|)$)。
如果梯度检查出现了问题,尝试debug具体出错的参数。
别忘记损失函数中的正则化项。
无法调试 dropout.
有时候,当$W, b$过大时导数的计算才会出现较大的误差。可以尝试先训练几轮网络,等参数大了,再做一次梯度检查。
总结
这堂课的信息量十分大。让我们总结一下:
- 数据集划分
- 训练集/开发集/测试集的意义
- 怎么去根据数据规模划分不同的数据集
- 偏差与方差
- 如何分辨高偏差与高方差问题
- 高偏差与高方差问题的一般解决思路
- 正则化
- 权重衰减
- dropout
- 数据增强
- 提前停止
- 梯度问题
- 梯度问题的产生原因
- 缓解梯度问题的方法
- 梯度检查的实现
这堂课中,正则化和参数带权初始化是两个很重要的话题,展开来的话有很多东西要学。过段时间,我会在课堂内容的基础上,对这些知识进行拓展介绍。
代码实战
在本周的代码实战中,我们将继续以点集分类任务为例,完成参数初始化和正则化两项任务。
参数初始化
项目地址:https://github.com/SingleZombie/DL-Demos/tree/master/dldemos/Initialization
在参数初始化问题中,我们要探究不同初始化方法对梯度更新的影响。假设我们有下面这样一个点集分类数据集:

我们分别用下面三种方法去初始化参数:
1 | if initialization == 'zeros': |
如果使用0初始化的话,就会出现之前学过的“参数对称性”问题。这个网络几乎学不到任何东西:
如果用比较大的值初始化的话,网络的梯度一直会很高,半天降不下来,学习速度极慢:
最后,我们使用比较高端的He Initialization.网络能够顺利学到东西了。
正则化
项目地址:https://github.com/SingleZombie/DL-Demos/tree/master/dldemos/Regularization
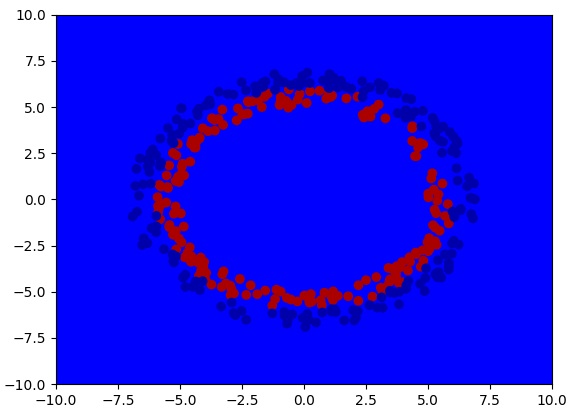
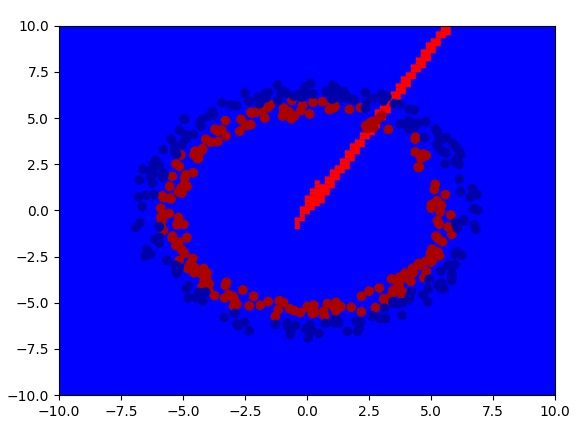
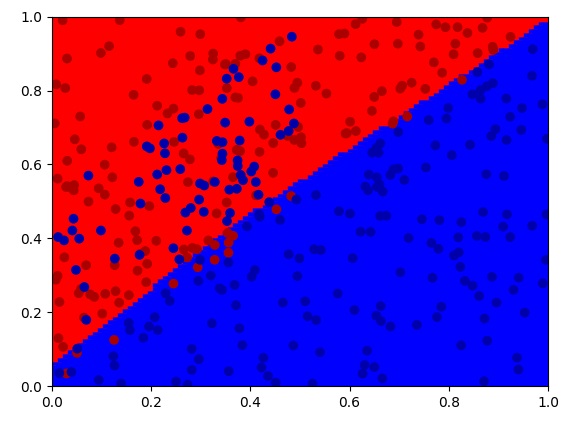
正则化要解决的是过拟合。为了“迫使”网络产生过拟合,我“精心”构造一个点集分类数据集:
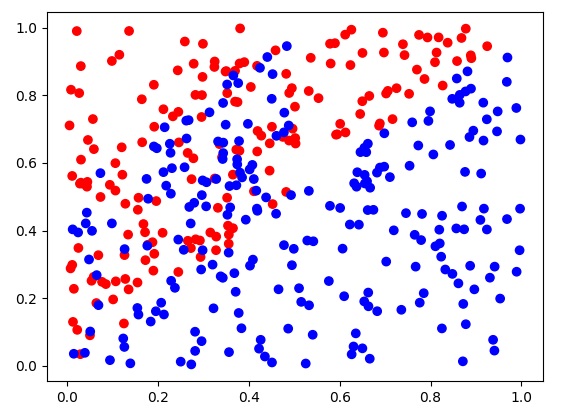
在这个分类任务中,比较理想的分类结果是一条直线。但是,由于表示噪声的蓝点比较多,网络可能会过拟合训练数据。
在这项实验中,我们将分别测试在“不使用正则化”、“使用正则项”、“使用dropout”这三种配置下网络的表现情况。
如我们所预计地,不使用正则化策略的网络会过拟合训练数据:
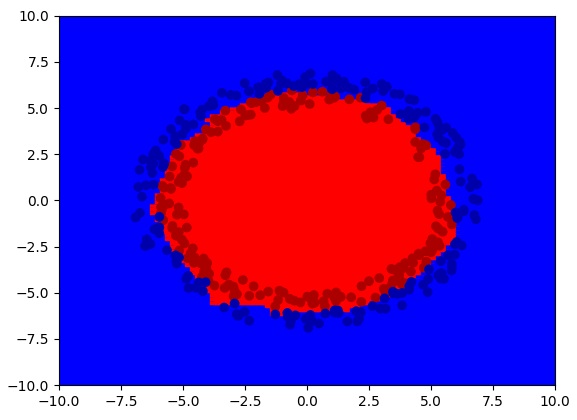
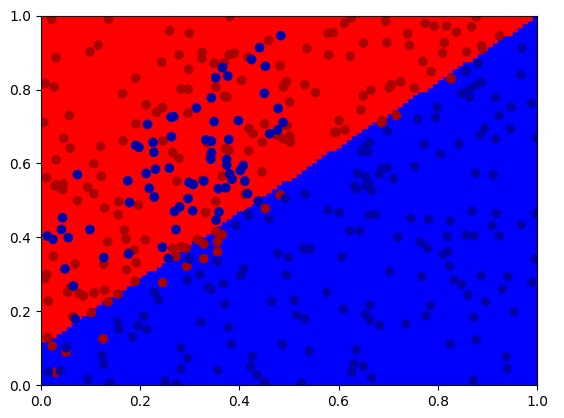
之后,我们按照公式,尝试给网络添加正则化项:
1 | def gradient_descent(self, learning_rate): |
网络成功规避了过拟合。
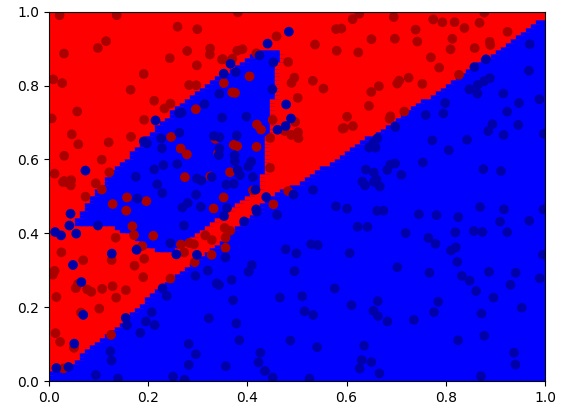
接下来,我们来尝试使用dropout策略。在训练时,我们每层有50%的概率丢掉训练结果:
1 | def forward(self, X, train_mode=True): |
同样,使用dropout后,我们也得到了一个比较满意的分类结果:
欢迎大家自行调试这两个项目~