前段时间我写了一篇VQVAE的解读,现在再补充一篇VQVAE的PyTorch实现教程。在这个项目中,我们会实现VQVAE论文,在MNIST和CelebAHQ两个数据集上完成图像生成。具体来说,我们会先实现并训练一个图像压缩网络VQVAE,它能把真实图像编码成压缩图像,或者把压缩图像解码回真实图像。之后,我们会训练一个生成压缩图像的生成网络PixelCNN。
代码仓库:https://github.com/SingleZombie/DL-Demos/tree/master/dldemos/VQVAE
项目运行示例
如果你只是想快速地把项目运行起来,可以只阅读本节。
在本地安装好项目后,运行python dldemos/VQVAE/dataset.py来下载MNIST数据集。之后运行python dldemos/VQVAE/main.py,这个脚本会完成以下四个任务:
- 训练VQVAE
- 用VQVAE重建数据集里的随机数据
- 训练PixelCNN
- 用PixelCNN+VQVAE随机生成图片
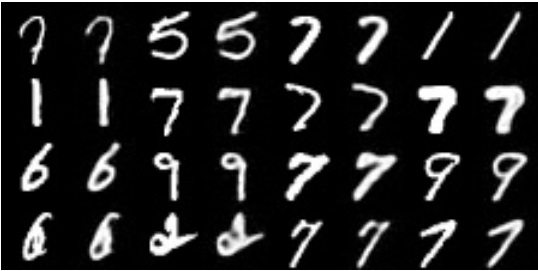
第二步得到的重建结果大致如下(每对图片中左图是原图,右图是重建结果):
第四步得到的随机生成结果大致如下:

如果你要使用CelebAHQ数据集,请照着下一节的指示把CelebAHQ下载到指定目录,再执行python dldemos/VQVAE/main.py -c 4。
数据集准备
MNIST数据集可以用PyTorch的API自动下载。我们可以用下面的代码下载MNIST数据集并查看数据的格式。从输出中可知,MNIST的图片形状为[1, 28, 28],颜色取值范围为[0, 1]。
1 | def download_mnist(): |
我们可以用下面的代码把它封成简单的Dataset。
1 | class MNISTImageDataset(Dataset): |
接下来准备CelebAHQ。CelebAHQ数据集原本的图像大小是1024x1024,但我们这个项目用不到这么大的图片。我在kaggle上找到了一个256x256的CelebAHQ (https://www.kaggle.com/datasets/badasstechie/celebahq-resized-256x256),所有文件加起来只有300MB左右,很适合我们项目。请在该页面下载压缩包,并把压缩包解压到项目的`data/celebA/celeba_hq_256`目录下。
下载完数据后,我们可以写一个简单的从目录中读取图片的Dataset类。和MNIST的预处理流程不同,我这里给CelebAHQ的图片加了一个中心裁剪的操作,一来可以让人脸占比更大,便于模型学习,二来可以让该类兼容CelebA数据集(CelebA数据集的图片不是正方形,需要裁剪)。这个操作是可选的。
1 | class CelebADataset(Dataset): |
有了数据集类后,我们可以用它们生成Dataloader。
1 | CELEBA_DIR = 'data/celebA/img_align_celeba' |
我们可以利用Dataloader来查看CelebAHQ数据集的内容及数据格式。1
2
3
4
5
6
7
8
9
10
11
12
13if os.path.exists(CELEBA_HQ_DIR):
dataloader = get_dataloader('CelebAHQ', 16)
img = next(iter(dataloader))
print(img.shape)
N = img.shape[0]
img = einops.rearrange(img,
'(n1 n2) c h w -> c (n1 h) (n2 w)',
n1=int(N**0.5))
print(img.shape)
print(img.max())
print(img.min())
img = transforms.ToPILImage()(img)
img.save('work_dirs/tmp_celebahq.jpg')
从输出中可知,CelebAHQ的颜色取值范围同样是[0, 1]。经我们的预处理流水线得到的图片如下。

实现并训练 VQVAE
要用VQVAE做图像生成,其实要训练两个模型:一个是用于压缩图像的VQVAE,另一个是生成压缩图像的PixelCNN。这两个模型是可以分开训练的。我们先来实现并训练VQVAE。
VQVAE的架构非常简单:一个编码器,一个解码器,外加中间一个嵌入层。损失函数为图像的重建误差与编码器输出与其对应嵌入之间的误差。
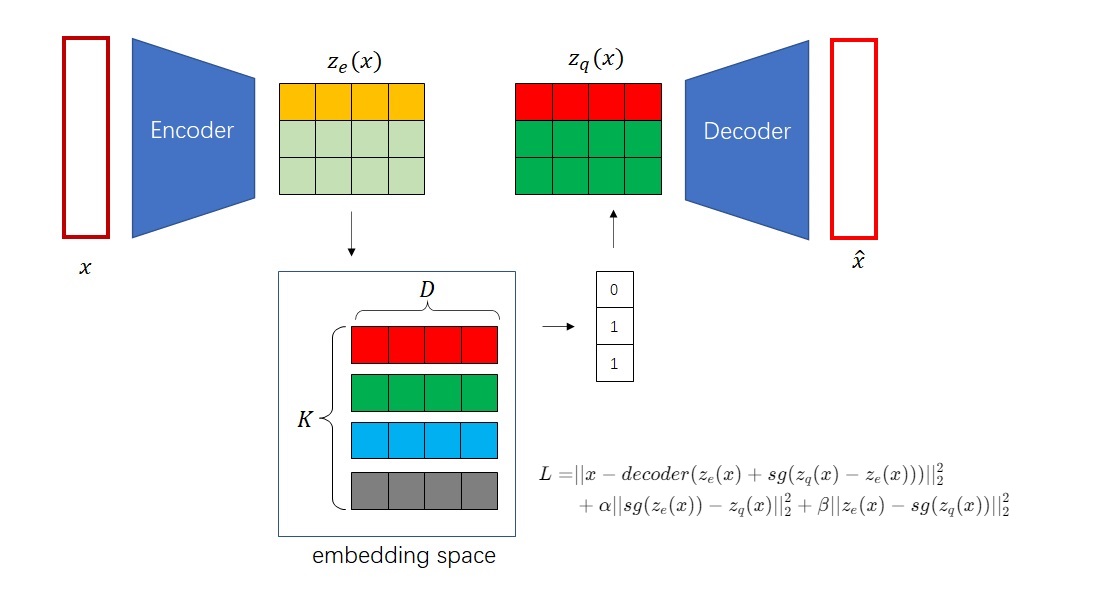
VQVAE的编码器和解码器的结构也很简单,仅由普通的上/下采样层和残差块组成。具体来说,编码器先是有两个3x3卷积+2倍下采样卷积的模块,再有两个残差块(ReLU, 3x3卷积, ReLU, 1x1卷积);解码器则反过来,先有两个残差块,再有两个3x3卷积+2倍上采样反卷积的模块。为了让代码看起来更清楚一点,我们不用过度封装,仅实现一个残差块模块,再用残差块和PyTorch自带模块拼成VQVAE。
先实现残差块。注意,由于模型比较简单,残差块内部和VQVAE其他地方都可以不使用BatchNorm。
1 | class ResidualBlock(nn.Module): |
有了残差块类后,我们可以直接实现VQVAE类。我们先在初始化函数里把模块按顺序搭好。编码器和解码器的结构按前文的描述搭起来即可。嵌入空间(codebook)其实就是个普通的嵌入层。此处我仿照他人代码给嵌入层显式初始化参数,但实测下来和默认的初始化参数方式差别不大。
1 | class VQVAE(nn.Module): |
之后,我们来实现模型的前向传播。这里的逻辑就略显复杂了。整体来看,这个函数完成了编码、取最近邻、解码这三步。其中,取最近邻的部分最为复杂。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21def forward(self, x):
# encode
ze = self.encoder(x)
# ze: [N, C, H, W]
# embedding [K, C]
embedding = self.vq_embedding.weight.data
N, C, H, W = ze.shape
K, _ = embedding.shape
embedding_broadcast = embedding.reshape(1, K, C, 1, 1)
ze_broadcast = ze.reshape(N, 1, C, H, W)
distance = torch.sum((embedding_broadcast - ze_broadcast)**2, 2)
nearest_neighbor = torch.argmin(distance, 1)
# make C to the second dim
zq = self.vq_embedding(nearest_neighbor).permute(0, 3, 1, 2)
# stop gradient
decoder_input = ze + (zq - ze).detach()
# decode
x_hat = self.decoder(decoder_input)
return x_hat, ze, zq
我们来详细看一看取最近邻的实现。取最近邻时,我们要用到两块数据:编码器输出ze与嵌入矩阵embedding。ze可以看成一个形状为[N, H, W]的数组,数组存储了长度为C的向量。而嵌入矩阵里有K个长度为C的向量。1
2
3
4
5# ze: [N, C, H, W]
# embedding [K, C]
embedding = self.vq_embedding.weight.data
N, C, H, W = ze.shape
K, _ = embedding.shape
为了求N*H*W个向量在嵌入矩阵里的最近邻,我们要先算这每个向量与嵌入矩阵里K个向量的距离。在算距离前,我们要把embedding和ze的形状变换一下,保证(embedding_broadcast - ze_broadcast)**2的形状为[N, K, C, H, W]。我们对这个临时结果的第2号维度(C所在维度)求和,得到形状为[N, K, H, W]的distance。它的含义是,对于N*H*W个向量,每个向量到嵌入空间里K个向量的距离分别是多少。1
2
3embedding_broadcast = embedding.reshape(1, K, C, 1, 1)
ze_broadcast = ze.reshape(N, 1, C, H, W)
distance = torch.sum((embedding_broadcast - ze_broadcast)**2, 2)
有了距离张量后,我们再对其1号维度(K所在维度)求最近邻所在下标。
1 | nearest_neighbor = torch.argmin(distance, 1) |
有了下标后,我们可以用self.vq_embedding(nearest_neighbor)从嵌入空间取出最近邻了。别忘了,nearest_neighbor的形状是[N, H, W],self.vq_embedding(nearest_neighbor)的形状会是[N, H, W, C]。我们还要把C维度转置一下。
1 | # make C to the second dim |
最后,我们用论文里提到的停止梯度算子,把zq变形一下。这样,算误差的时候用的是zq,算梯度时ze会接收解码器传来的梯度。
1 | # stop gradient |
求最近邻的部分就到此结束了。最后再补充一句,前向传播函数不仅返回了重建结果x_hat,还返回了ze, zq。这是因为我们待会要在训练时根据ze, zq求损失函数。
准备好了模型类后,假设我们已经用某些超参数初始化好了模型model,我们可以用下面的代码训练VQVAE。
1 | def train_vqvae(model: VQVAE, |
先看一下训练函数的参数。其他参数都没什么特别的,只有误差权重l_w_embedding=1,l_w_commitment=0.25需要讨论一下。误差函数有三项,但论文只给了第三项的权重(0.25),默认第二项的权重为1。我在实现时把第二项的权重l_w_embedding也加上了。1
2
3
4
5
6
7
8
9
10def train_vqvae(model: VQVAE,
img_shape=None,
device='cuda',
ckpt_path='dldemos/VQVAE/model.pth',
batch_size=64,
dataset_type='MNIST',
lr=1e-3,
n_epochs=100,
l_w_embedding=1,
l_w_commitment=0.25):
再来把函数体过一遍。一开始,我们可以用传来的参数把dataloader初始化一下。
1 | print('batch size:', batch_size) |
再把模型的状态调好,并准备好优化器和算均方误差的函数。
1 | model.to(device) |
准备好变量后,进入训练循环。训练的过程比较常规,唯一要注意的就是误差计算部分。由于我们把复杂的逻辑都放在了模型类中,这里我们可以直接先用model(x)得到重建图像x_hat和算误差的ze, zq,再根据论文里的公式算3个均方误差,最后求一个加权和,代码比较简明。1
2
3
4
5
6
7
8
9
10
11
12
13
14for e in range(n_epochs):
for x in dataloader:
current_batch_size = x.shape[0]
x = x.to(device)
x_hat, ze, zq = model(x)
l_reconstruct = mse_loss(x, x_hat)
l_embedding = mse_loss(ze.detach(), zq)
l_commitment = mse_loss(ze, zq.detach())
loss = l_reconstruct + \
l_w_embedding * l_embedding + l_w_commitment * l_commitment
optimizer.zero_grad()
loss.backward()
optimizer.step()
训练完毕后,我们可以用下面的代码来测试VQVAE的重建效果。所谓重建,就是模拟训练的过程,随机取一些图片,先编码后解码,看解码出来的图片和原图片是否一致。为了获取重建后的图片,我们只需要直接执行前向传播函数model(x)即可。
1 | def reconstruct(model, x, device, dataset_type='MNIST'): |
训练压缩图像生成模型 PixelCNN
有了一个VQVAE后,我们要用另一个模型对VQVAE的离散空间采样,也就是训练一个能生成压缩图片的模型。我们可以按照VQVAE论文的方法,使用PixelCNN来生成压缩图片。
PixelCNN 的原理及实现方法就不在这里过多介绍了。详情可以参见我之前的PixelCNN解读文章。简单来说,PixelCNN给每个像素从左到右,从上到下地编了一个序号,让每个像素仅由之前所有像素决定。采样时,PixelCNN按序号从左上到右下逐个生成图像的每一个像素;训练时,PixelCNN使用了某种掩码机制,使得每个像素只能看到编号更小的像素,并行地输出每一个像素的生成结果。
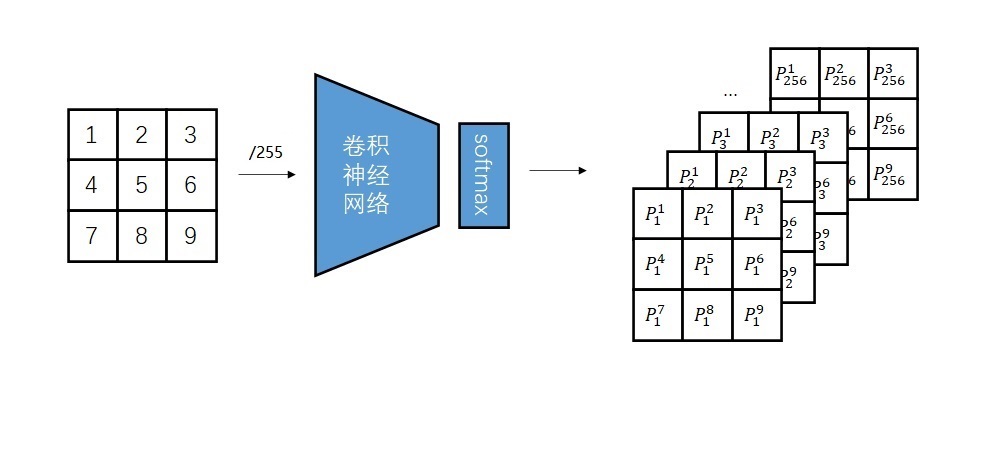
PixelCNN具体的训练示意图如下。模型的输入是一幅图片,每个像素的取值是0~255;模型给图片的每个像素输出了一个概率分布,即表示此处颜色取0,取1,……,取255的概率。由于神经网络假设数据的输入符合标准正态分布,我们要在数据输入前把整型的颜色转换成0~1之间的浮点数。最简单的转换方法是除以255。
以上是训练PixelCNN生成普通图片的过程。而在训练PixelCNN生成压缩图片时,上述过程需要修改。压缩图片的取值是离散编码。离散编码和颜色值不同,它不是连续的。你可以说颜色1和颜色0、2相近,但不能说离散编码1和离散编码0、2相近。因此,为了让PixelCNN建模离散编码,需要把原来的除以255操作换成一个嵌入层,使得网络能够读取离散编码。
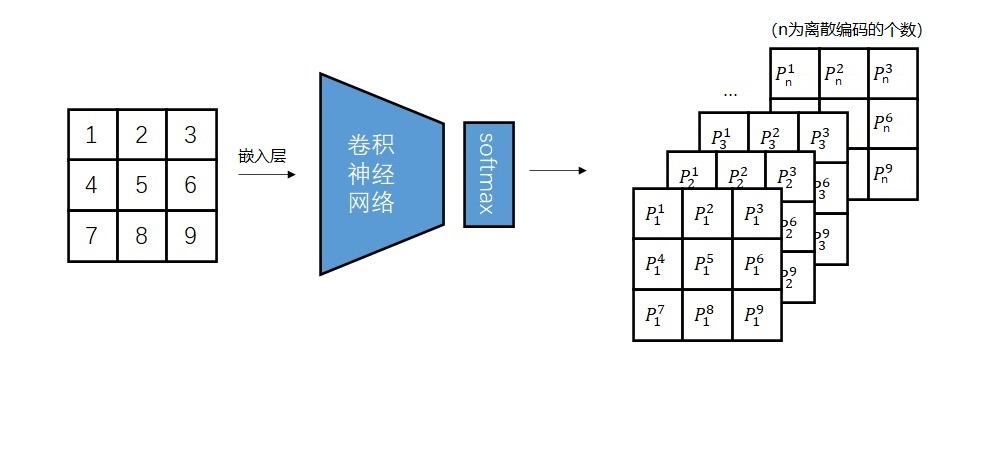
反映在代码中,假设我们已经有了一个普通的PixelCNN模型GatedPixelCNN,我们需要在整个模型的最前面套一个嵌入层,嵌入层的嵌入个数等于离散编码的个数(color_level),嵌入长度等于模型的特征长度(p)。由于嵌入层会直接输出一个长度为p的向量,我们还需要把第一个模块的输入通道数改成p。
1 | from dldemos.pixelcnn.model import GatedPixelCNN, GatedBlock |
有了一个能处理离散编码的PixelCNN后,我们可以用下面的代码来训练PixelCNN。
1 | def train_generative_model(vqvae: VQVAE, |
训练部分的核心代码如下:
1 | loss_fn = nn.CrossEntropyLoss() |
这段代码的意思是说,从训练集里随机取图片x,再将图片压缩成离散编码x = vqvae.encode(x)。这时,x既是PixelCNN的输入,也是PixelCNN的拟合目标。把它输入进PixelCNN,PixelCNN会输出每个像素的概率分布。用交叉熵损失函数约束输出结果即可。
训练完毕后,我们可以用下面的函数来完成整套图像生成流水线。
1 | def sample_imgs(vqvae: VQVAE, |
抛掉前后处理,和图像生成有关的代码如下。一开始,我们要随便创建一个空图片x,用于储存PixelCNN生成的压缩图片。之后,我们按顺序遍历每个像素,把当前图片输入进PixelCNN,让PixelCNN预测下一个像素的概率分布prob_dist。我们再用torch.multinomial从概率分布中采样,把采样的结果填回图片。遍历结束后,我们用VQVAE的解码器把压缩图片变成真实图片。1
2
3
4
5
6
7
8
9
10
11
12
13C, H, W = img_shape
H, W = vqvae.get_latent_HW((C, H, W))
input_shape = (n_sample, H, W)
x = torch.zeros(input_shape).to(device).to(torch.long)
with torch.no_grad():
for i in range(H):
for j in range(W):
output = gen_model(x)
prob_dist = F.softmax(output[:, :, i, j], -1)
pixel = torch.multinomial(prob_dist, 1)
x[:, i, j] = pixel[:, 0]
imgs = vqvae.decode(x)
至此,我们已经实现了用VQVAE做图像生成的四个任务:训练VQVAE、重建图像、训练PixelCNN、随机生成图像。完整的main函数如下:
1 | if __name__ == '__main__': |
实验
VQVAE有两个超参数:嵌入个数n_embedding、特征向量长度dim。论文中n_embedding=512,dim=256。而经我实现发现,用更小的参数量也能达到不错的效果。
所有实验的配置文件我都放在了该项目目录下config.py文件中。对于MNIST数据集,我使用的模型超参数为:dim=32, n_embedding=32。VQVAE重建结果如下所示。可以说重建得几乎完美(每对图片左图为原图,右图为重建结果)。
而对于CelebAHQ数据集,我测试了不同输入尺寸下的不同VQVAE,共有4组配置。
shape=(3, 128, 128) dim=128 n_embedding=64shape=(3, 128, 128) dim=128 n_embedding=128shape=(3, 64, 64) dim=128 n_embedding=64shape=(3, 64, 64) dim=128 n_embedding=32
实验的结果很好预测。对于同尺寸的图片,嵌入数越多重建效果越好。这里我只展示下第一组和第二组的重建结果。
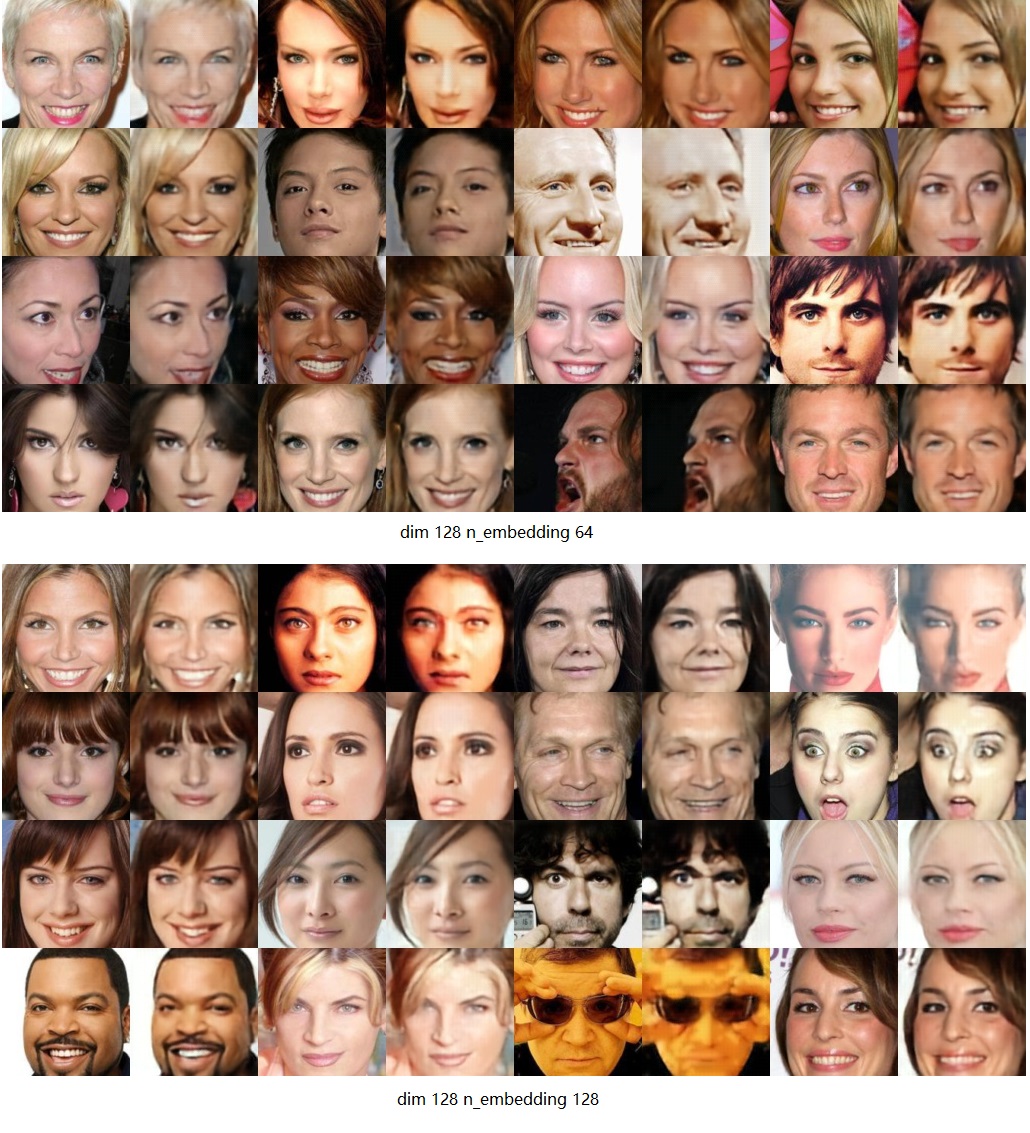
可以看出,VQVAE的重建效果还不错。但由于只使用了均方误差,重建图片在细节上还是比较模糊。重建效果还是很重要的,它决定了该方法做图像生成的质量上限。后续有很多工作都试图提升VQVAE的重建效果。
接下来来看一下随机图像生成的实验。PixelCNN主要有模块数n_blocks、特征长度dim,输出线性层特征长度linear_dim这三个超参数。其中模块数一般是固定的,而输出线性层就被用了一次,其特征长度的影响不大。最需要调节的是特征长度dim。对于MNIST,我的超参数设置为
n_blocks=15 dim=128 linear_dim=32.
对于CelebAHQ,我的超参数设置为
n_blocks=15 dim=384 linear_dim=256.
PixelCNN的训练时间主要由输入图片尺寸和dim决定,训练难度主要由VQVAE的嵌入个数(即多分类的类别数)决定。PixelCNN训起来很花时间。如果时间有限,在CelebAHQ上建议只训练最小最简单的第4组配置。我在项目中提供了PixelCNN的并行训练脚本,比如用下面的命令可以用4张卡在1号配置下并行训练。
1 | torchrun --nproc_per_node=4 dldemos/VQVAE/dist_train_pixelcnn.py -c 1 |
来看一下实验结果。MNIST上的采样结果还是非常不错的。
CelebAHQ上的结果会差一点。以下是第4组配置(图像边长64,嵌入数32)的采样结果。大部分图片都还行,起码看得出是一张人脸。但64x64的图片本来就分辨率不高,加上VQVAE解码的损耗,放大来看人脸还是比较模糊的。

第1组配置(图像边长128,嵌入数64)的PixelCNN实在训练得太慢了,我只训了一个半成品模型。由于部分生成结果比较吓人,我只挑了几个还能看得过去的生成结果。可以看出,如果把模型训完的话,边长128的模型肯定比边长64的模型效果更好。

参考资料
网上几乎找不到在CelebAHQ上训练的VQVAE PyTorch项目。我在实现这份代码时,参考了以下项目:
- 官方TensorFlow实现 https://github.com/deepmind/sonnet/blob/v1/sonnet/examples/vqvae_example.ipynb 。主要代码都写在一个notebook里。
- 官方实现的PyTorch复现 https://github.com/MishaLaskin/vqvae。
- 苏剑林的TensorFlow实现。用的生成模型不是PixelCNN而是Transformer。https://github.com/bojone/vae/blob/master/vq_vae_keras.py
实验经历分享
别看VQVAE的代码不难,我做这些实验时还是经历了不少波折的。
一开始,我花一天就把代码写完了,并完成了MNIST上的实验。我觉得在MNIST上做实验的难度太低,不过瘾,就准备把数据集换成CelebA再做一些实验。结果这一做就是两个星期。
换成CelebA后,我碰到的第一个问题是VQVAE训练速度太慢。我尝试减半模型参数,训练时间却减小得不明显。我大致猜出是数据读取占用了大量时间,用性能分析工具一查,果然如此。原来我在DataLoader中一直只用了一个线程,加上num_workers=4就好了。我还把数据集打包成LMDB格式进一步加快数据读取速度。
之后,我又发现VQVAE在CelebA上的重建效果很差。我尝试增加模型参数,没起作用。我又怀疑是64x64的图片质量太低,模型学不到东西,就尝试把输入尺寸改成128x128,并把数据集从CelebA换成CelebAHQ,重建效果依然不行。我调了很多参数,发现了一些奇怪的现象:在嵌入层前使用和不使用BatchNorm对结果的影响很大,且显式初始化嵌入层会让模型的误差一直居高不下。我实在是找不到问题,就拿代码对着别人的PyTorch实现一行一行比较过去。总算,我发现我在使用嵌入层时是用vq_embedding.weight.data[x](因为前面已经获取了这个矩阵,这样写比较自然),别人是用vq_embedding(x)。我的写法会把嵌入层排除在梯度计算外,嵌入层根本得不到优化。我说怎么换了一个嵌入层的初始化方法模型就根本训不动了。改完bug之后,只训了5个epoch,新模型的误差比原来训练数小时的模型要低了。新模型的重建效果非常好。
总算,任务完成了一半,现在只剩PixelCNN要训练了。我先尝试训练输入为128x128,嵌入数64的模型,采样结果很差。为了加快实验速度,我把输入尺寸减小到64x64,再次训练,采样结果还是不行。根据我之前的经验,PixelCNN的训练难度主要取决于类别数。于是,我把嵌入的数量从64改成了32,并大幅增加PixelCNN的参数量,再次训练。过了很久,训练误差终于降到0.08左右。我一测,这次的采样结果还不错。
这样看来,之前的采样效果不好,是输入128x128,嵌入数64的实验太难了。我毕竟只是想做一个demo,在一个小型实验上成功就行了,没必要花时间去做更耗时的实验。按理说,我应该就此收手。但是,我就是咽不下这一口气,就是想在128x128的实验上成功。我再次加大了PixelCNN的参数量,用128x128的配置,大火慢炖,训练了一天一夜。第二天一早起来,我看到这回的误差也降到了0.08。上次的实验误差降到这个程度时实验已经成功了。我迫不及待地去测试采样效果,却发现采样效果还是稀烂。没办法,我选择投降,开始写这篇文章,准备收工。
写到PixelCNN介绍的那一章节时,我正准备讲解代码。看到PixelCNN训练之前预处理除以color_level那一行时,我楞了一下:这行代码是用来做什么的来着?这段代码全是从PixelCNN项目里复制过来的。当时是做普通图片的图像生成,所以要对输入颜色做一个预处理,把整数颜色变成0~1之间的浮点数。但现在是在生成压缩图片,不能这样处理啊!我恍然大悟,知道是在处理离散输入时做错了。应该多加一个嵌入层,把离散值转换成向量。由于VQVAE的重点不在生成模型上,原论文根本没有强调PixelCNN在离散编码上的实现细节。网上几乎所有文章也都没谈这一点。因此,我在实现PixelCNN时,直接不假思索地把原来的代码搬了过来,根本没想过这种地方会出现bug。
把这处bug改完后,我再次开启训练。这下所有模型的采样结果都正常了。误差降到0.5左右就已经有不错的采样结果了,原来我之前把误差降到0.08完全是无用功。太气人了。
这次的实验让我学到了很多东西。首先是PyTorch编程上的一些注意事项:
- 调用
embedding.weight.data[x]是传不了梯度的。 - 如果读数据时有费时的处理操作(读写硬盘、解码),要在
Dataloader里设置num_workers。
另外,在测试一个模型是否实现成功时有一个重要的准则:
- 不要仅在简单的数据集(如MNIST)上测试。测试成功可能只是暴力拟合的结果。只有在一个难度较大的数据集上测试成功才能说模型没有问题。
在观察模型是否训成功时,还需要注意:
- 训练误差降低不代表模型更优。训练误差的评价方法和模型实际使用方法可能完全不同。不能像我这样偷懒不加测试指标。
除了学到的东西外,我还有一些感想。在别人的项目的基础上修改、照着他人代码复现、完全自己动手从零开始写,对于深度学习项目来说,这三种实现方式的难度是依次递增的。改别人的项目,你可能去配置文件里改一两个数字就行了。而照着他人代码复现,最起码你能把代码改成和他人的代码一模一样,然后再去比较哪一块错了。自己动手写,则是有bug都找不到可以参考的地方了。说深度学习的算法难以调试,难就难在这里。效果不好,你很难说清是训练代码错了、超参数没设置好、训练流程错了,或是测试代码错了。可以出错的地方太多了,通常的代码调试手段难以用在深度学习项目上。
对于想要在深度学习上有所建树的初学者,我建议一定要从零动手复现项目。很多工程经验是难以总结的,只有踩了一遍坑才能知道。除了凭借经验外,还可以掌握一些特定的工程方法来减少bug的出现。比如运行训练之前先拿性能工具分析一遍,看看代码是否有误,是否可以提速;又比如可以训练几步后看所有可学习参数是否被正确修改。